
 The Scorbot ER-V robotic manipulator arms, sold by Intellitek in the early 90s, are still -in their new models and in the oldies, if they still survive- a nice educational tool for Robotics subjects, lying in an intermediate level between real industrial manipulators and low-cost devices.
The Scorbot ER-V robotic manipulator arms, sold by Intellitek in the early 90s, are still -in their new models and in the oldies, if they still survive- a nice educational tool for Robotics subjects, lying in an intermediate level between real industrial manipulators and low-cost devices.
In this page you can find a Matlab© toolbox (entirely written in Matlab©) that includes a kinematic simulation of these kind of robots and a connection, through RS232 serial port, to a real robot of the old versions. This has served us for recovering and still using these robust machines in a modern environment, even after so many years. It has been reported previously in this paper.
The toolbox is still in a beta version, but it has several nice features already:
- Faithful kinematic simulation (only poses, not speeds) of the ER-V robotic arm, that includes both direct and inverse kinematic models.
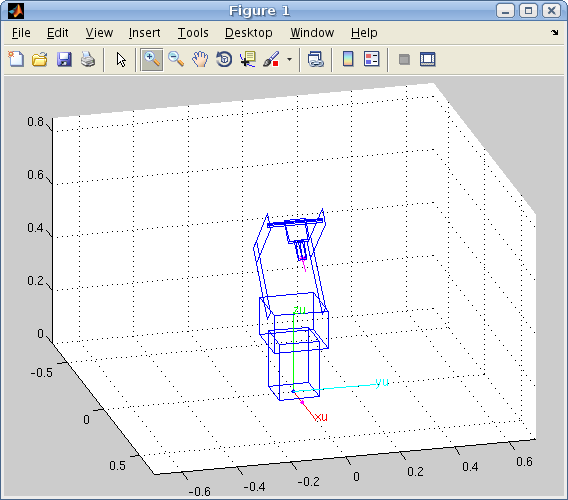
- Graphical window that shows a wireframe simple 3D model of the robot in simulation mode, with some visual aids such as spatial references.
- Serial connection to a real ER-V controller to command the robot from Matlab©, that only consumes a position variable in the RAM of the controller (all the other stuff -positions, program logic, etc.- is managed in Matlab©).
- Easy programming in Matlab© of the robot (both real and simulated) through a basic set of commands and a very simple object-oriented interface.
- Possibility of controlling both the simulation and the real robot simultaneously, with a single object.
Installation and usage:
- Download the sources of the library (zip).
- Decompress the ScorbotERVlibForMatlab.zip file into any accessable MatLab© folder.
- Run
demoto see a basic demo. - Type help
Scorbotto see detailed help of theScorbotobject, its methods and usage.
Here you can see a video of the basic demo that comes with the toolbox: