
This is the result of our initial unit tests: first a home (including opening/closing the gripper), then check the direction of movement of every joint, and finally, relaxing every joint.
Category Archives: Work
Work done in the project
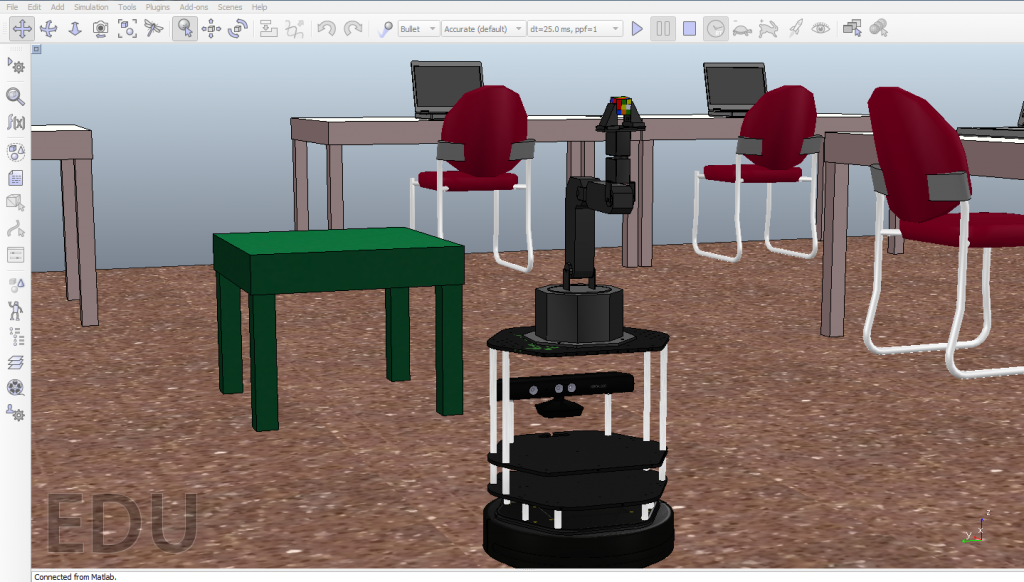
Turtlebot moves a Rubik’s cube in V-REP
List of implemented topics in MATLAB©:
- /arm_1_joint/command
- /arm_2_joint/command
- /arm_3_joint/command
- /arm_4_joint/command
- /arm_5_joint/command
- /camera/depth/image
- /camera/depth/image/compressed
- /camera/rgb/omage_color
- /camera/rgb/image_color/compressed
- /camera/rgb/image_mono
- /camera/rgb/image_mono/compressed
- /gripper_1_joint/command
- /mobile_base/commands/led1
- /mobile_base/commands/led2
- /mobile_base/commands/motor_power
- /mobile_base/commands/reset_odometry
- /mobile_base/commands/velocity
- /mobile_base/controller_info
- /mobile_base/sensors/core
- /odom
CRUMB in RViz
We have completed the robot model in ROS. To incorporate the Widow-X arm on the Turtlebot platform, we have to include these lines in the xacro file:
<joint name="fixed" type="fixed">
<parent link="plate_top_link"/>
<child link="${prefix}arm_base_link"/>
</joint>
And we have to add the Turtlebot library and the Turtlebot:
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_library.urdf.xacro"/>
<kobuki/>
<stack_hexagons parent="base_link"/>
<sensor_kinect parent="base_link"/>
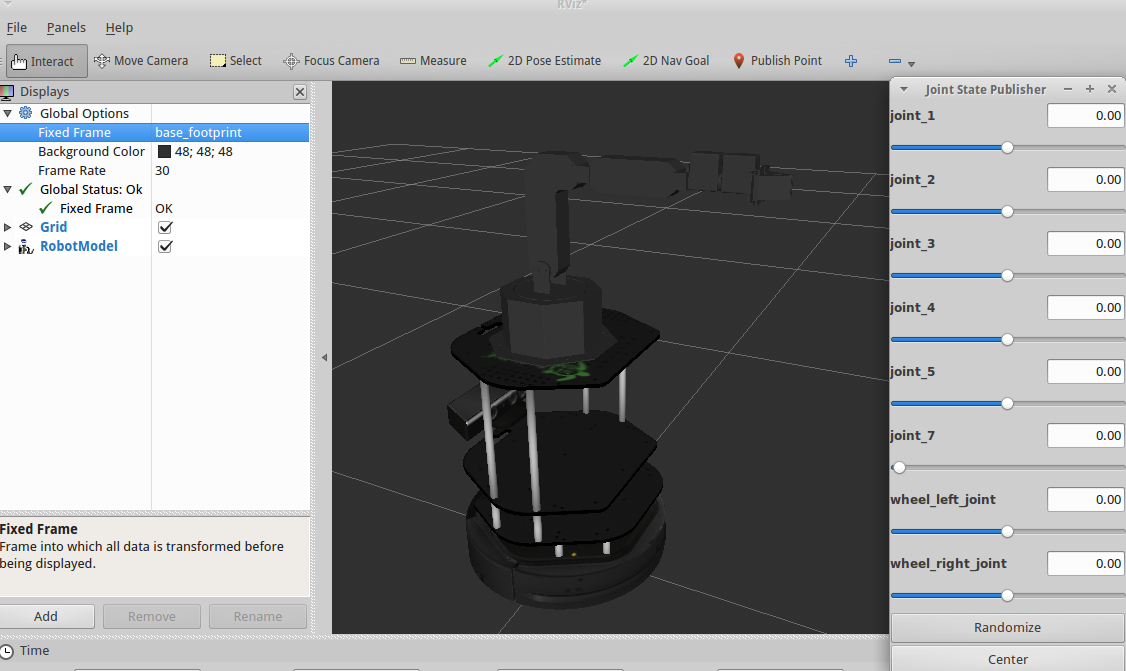
The figure shows CRUMB in Rviz and, similarly to Widow-X, we can use joint_state_publisher node to test the model.
The packages to simulate Widow-x and CRUMB will be uploaded soon 🙂
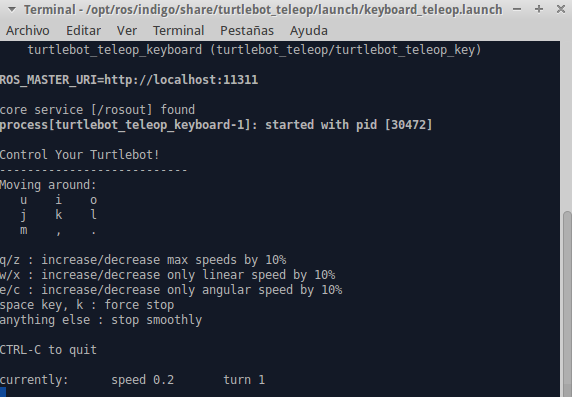
How to simulate Turtlebot in Ros/Gazebo?
To simulate Turtlebot platform in Ros Indigo/Gazebo, we have to install turtlebot packages:
sudo apt-get install ros-indigo-turtlebot ros-indigo-turtlebot-apps ros-indigo-turtlebot-interactions ros-indigo-turtlebot-simulator ros-indigo-kobuki-ftdi ros-indigo-rocon-remocon ros-indigo-rocon-qt-library ros-indigo-ar-track-alvar-msgs
When the installation finishes, write in the terminal:
source /opt/ros/indigo/setup.bash
roslaunch turtlebot_gazebo turtlebot_world.launch

And, to move the Turtlebot model, open a new terminal and write:
source /opt/ros/indigo/setup.bash
roslaunch turtlebot_teleop keyboard_teleop.launch
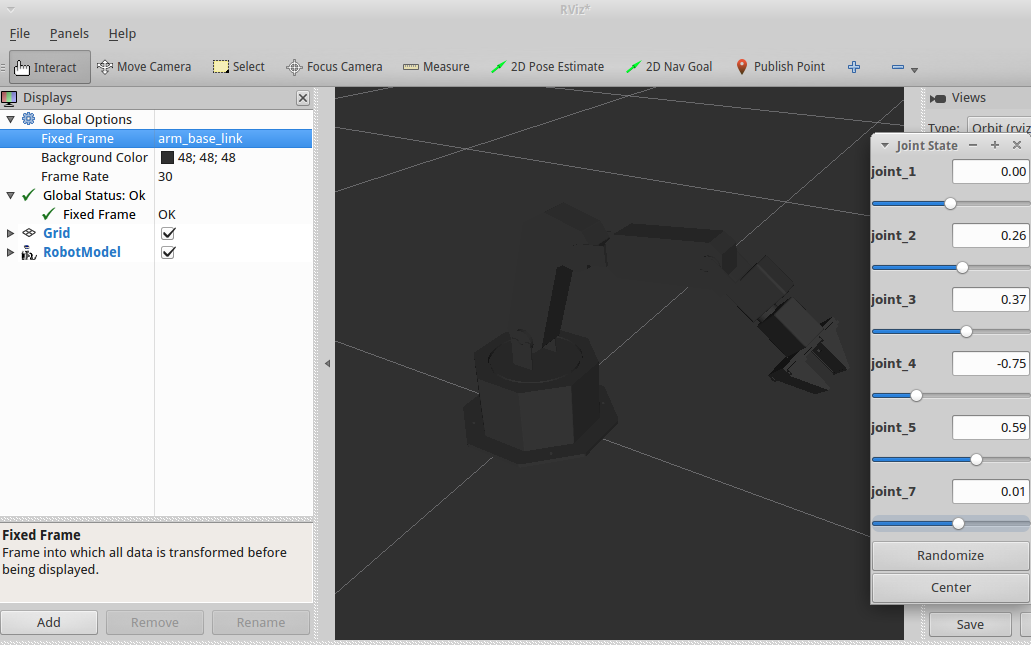
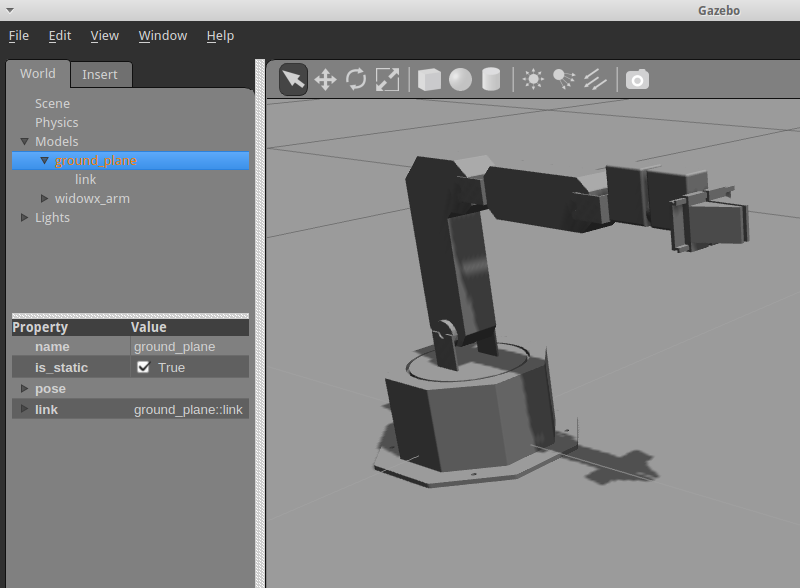
Widow-X arm in Rviz
As we have said in the previous post, RViz is a tool to visualize robots. It is very useful because it allows us to check robot joints by using joint_state_publisher node.
First steps with ROS
In this first post we have simulated Widow-X arm in ROS/Indigo. There are several simulators available in ROS, for instance:
– MoveIt!, which is a motion planning.
– Stage, very useful to 2D navigation.
– Gazebo, tool to test algorithms and design robots.
– Rviz, tool to visualize the robots.
For this project Gazebo has been selected with its recommended version for Indigo, Gazebo 2.X. If you are not using Indigo, take a look to this web to know which Gazebo version you need.
The model and its home position are shown in the following figures.
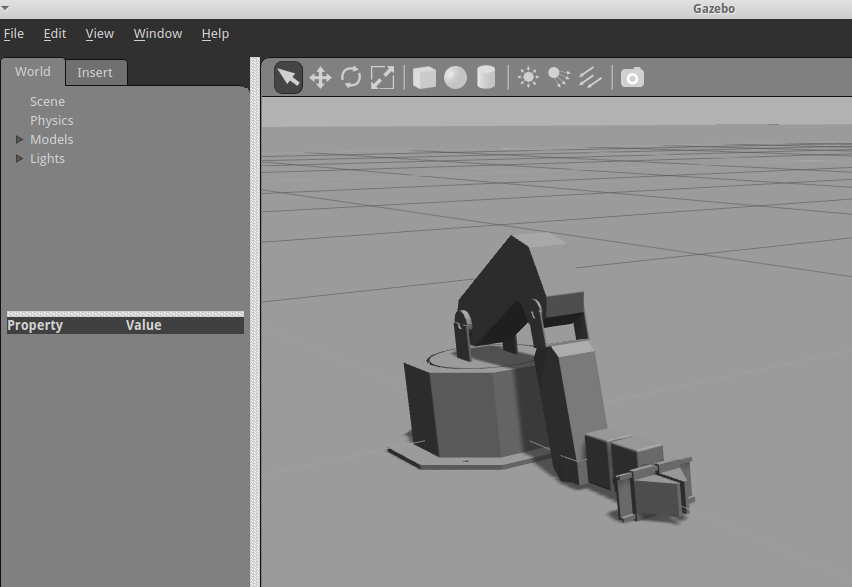
Robot motion identification
Dr. Ana Cruz-Martín has recorded a video on how to identify the motion characteristics of our robot: