
We have completed the robot model in ROS. To incorporate the Widow-X arm on the Turtlebot platform, we have to include these lines in the xacro file:
<joint name="fixed" type="fixed">
<parent link="plate_top_link"/>
<child link="${prefix}arm_base_link"/>
</joint>
And we have to add the Turtlebot library and the Turtlebot:
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_library.urdf.xacro"/>
<kobuki/>
<stack_hexagons parent="base_link"/>
<sensor_kinect parent="base_link"/>
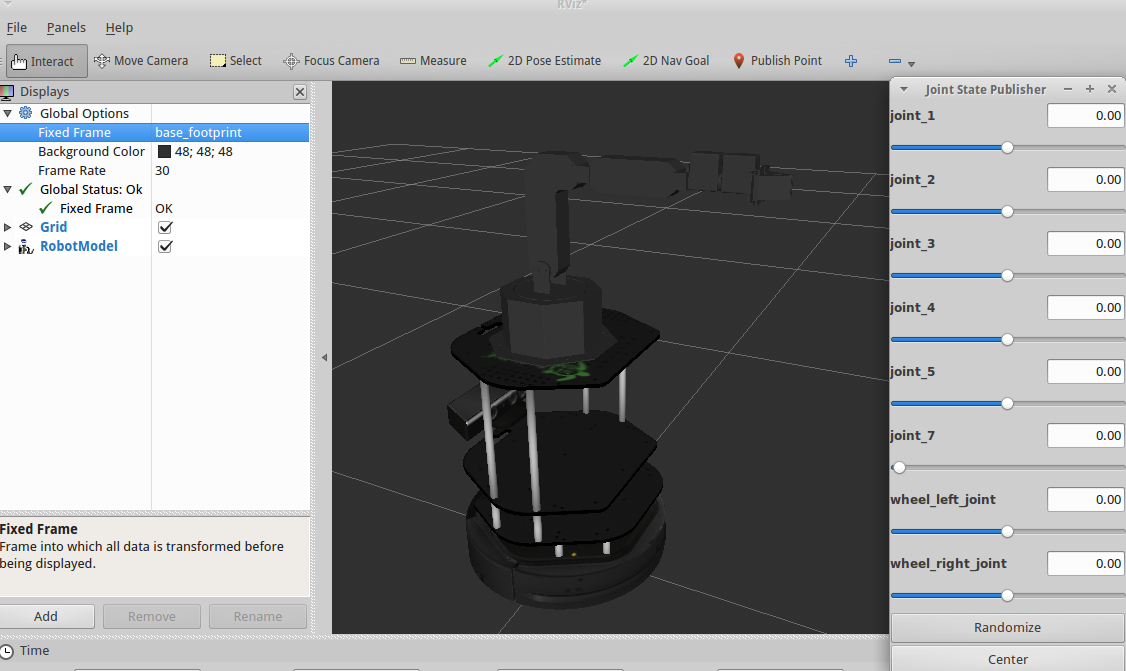
The figure shows CRUMB in Rviz and, similarly to Widow-X, we can use joint_state_publisher node to test the model.
The packages to simulate Widow-x and CRUMB will be uploaded soon 🙂