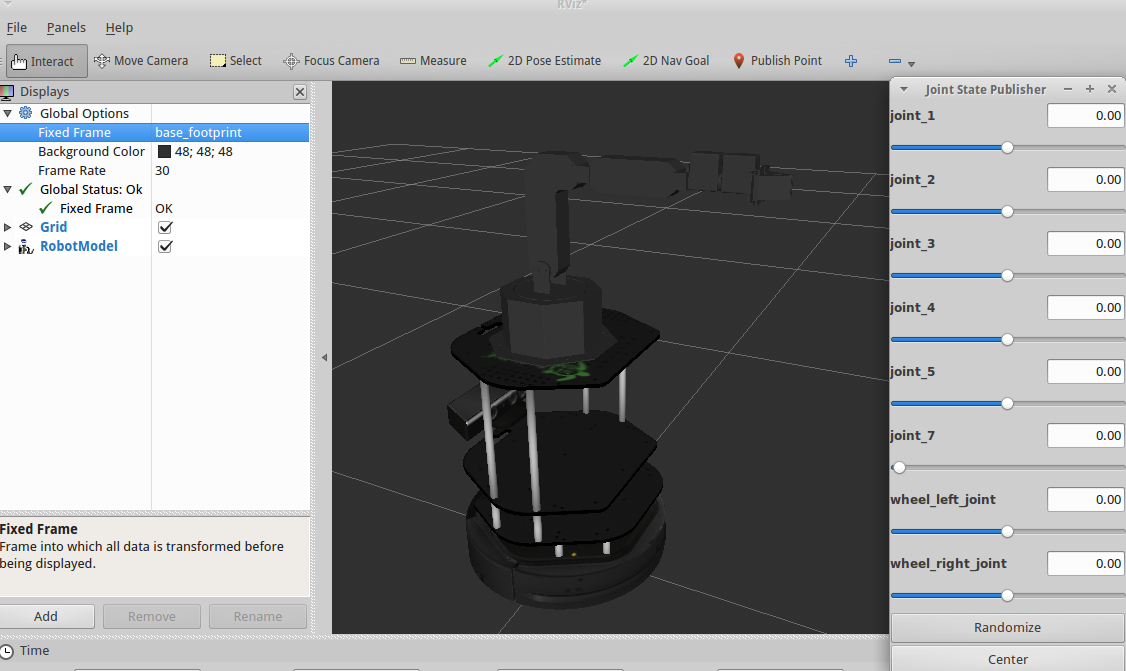
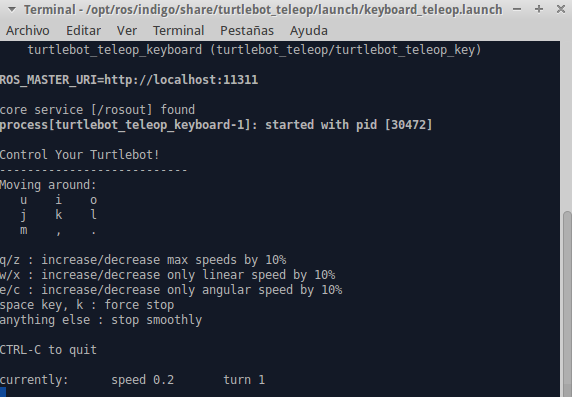
Here you can download a manual (written in Spanish by Sergio González-Muriel) for doing a fresh installation of the original software suite shipped with the Crumb robot (Turtlebot + WidowX arm) and its Gazebo simulators. This installation uses an old version of Ubuntu and the other sw (e.g., ROS) because of dependencies of some packages with old software.
Recall that we have a GitHub repository for CRUMB.
Here you can download some packages that have to be installed as they are.
UPDATE [Feb 2020]: Here you can download another manual (in English) for replicating the CRUMB software using newer versions of ROS and Ubuntu.