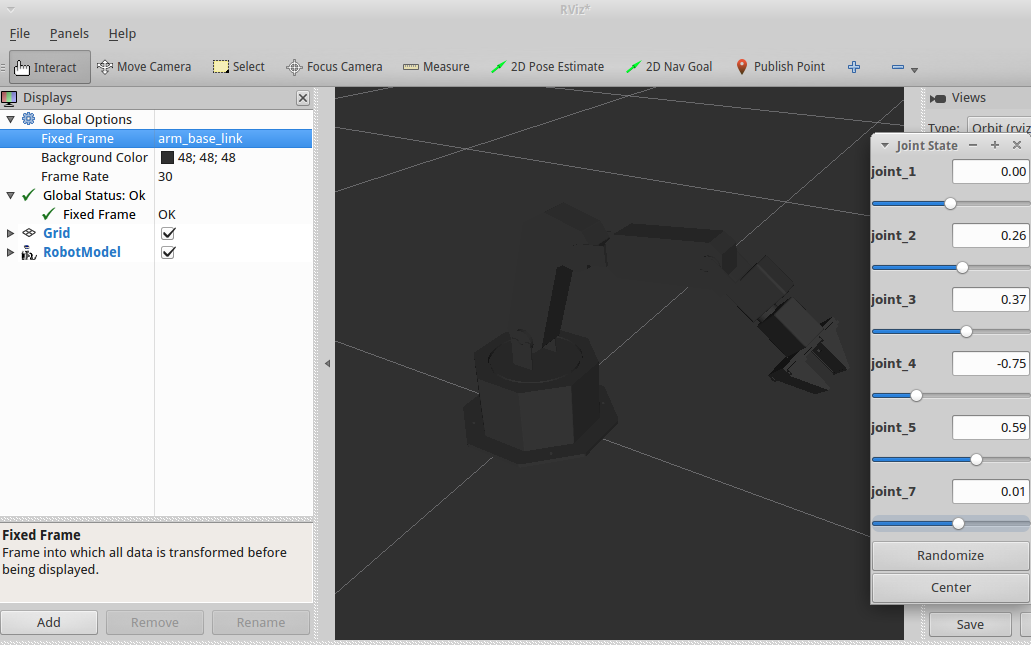
As we have said in the previous post, RViz is a tool to visualize robots. It is very useful because it allows us to check robot joints by using joint_state_publisher node.

Work done on creating a simulator of the robot for ROS
As we have said in the previous post, RViz is a tool to visualize robots. It is very useful because it allows us to check robot joints by using joint_state_publisher node.
In this first post we have simulated Widow-X arm in ROS/Indigo. There are several simulators available in ROS, for instance:
– MoveIt!, which is a motion planning.
– Stage, very useful to 2D navigation.
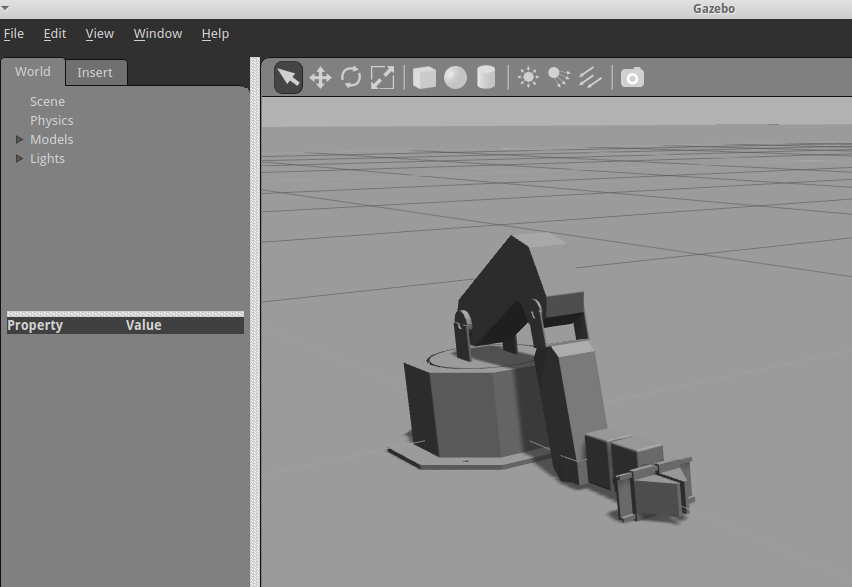
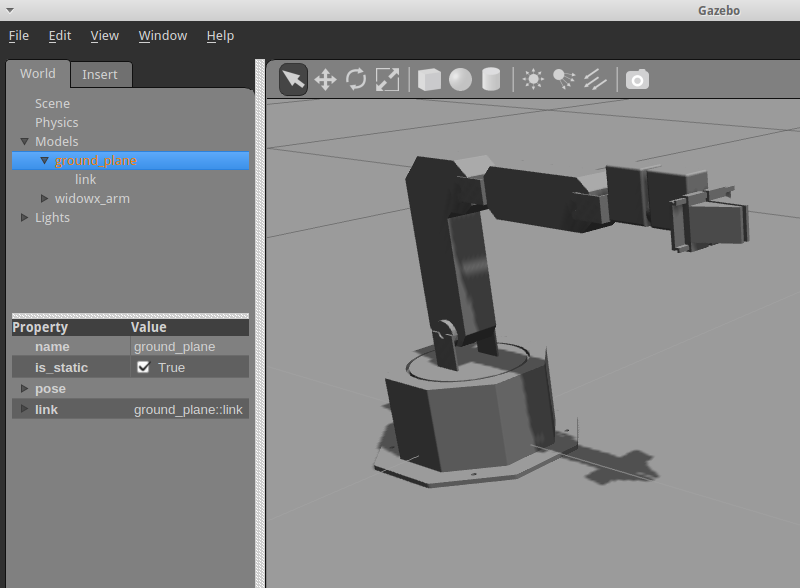
– Gazebo, tool to test algorithms and design robots.
– Rviz, tool to visualize the robots.
For this project Gazebo has been selected with its recommended version for Indigo, Gazebo 2.X. If you are not using Indigo, take a look to this web to know which Gazebo version you need.
The model and its home position are shown in the following figures.