To simulate Turtlebot platform in Ros Indigo/Gazebo, we have to install turtlebot packages:
sudo apt-get install ros-indigo-turtlebot ros-indigo-turtlebot-apps ros-indigo-turtlebot-interactions ros-indigo-turtlebot-simulator ros-indigo-kobuki-ftdi ros-indigo-rocon-remocon ros-indigo-rocon-qt-library ros-indigo-ar-track-alvar-msgs
When the installation finishes, write in the terminal:
source /opt/ros/indigo/setup.bash
roslaunch turtlebot_gazebo turtlebot_world.launch

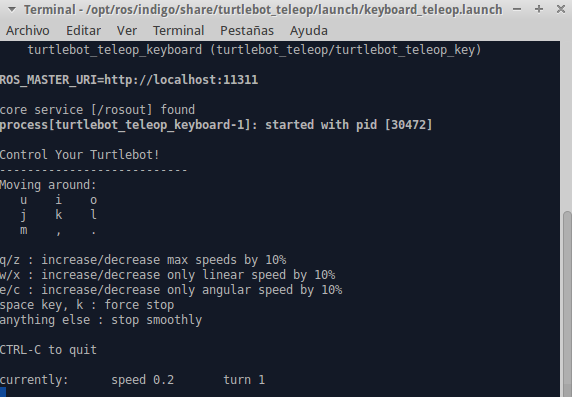
And, to move the Turtlebot model, open a new terminal and write:
source /opt/ros/indigo/setup.bash
roslaunch turtlebot_teleop keyboard_teleop.launch