|
|
| Line 398: |
Line 398: |
| | </TABLE> | | </TABLE> |
| | </CENTER> | | </CENTER> |
| − |
| |
| − |
| |
| − |
| |
| − | == Specifications for the RPD_Server module ==
| |
| − |
| |
| − | All services should be executed in less than 100ms, except the getLogicalDevicePose service which may require invoking several other services to acquire the current configuration of mobile parts of the robot.
| |
| − |
| |
| − | Notice that the returned information for any logical device implicitly includes the parameters for opening the associated HAD layer driver module. This information is extracted from the physical devices table in the database and automatically put together to all responses of the server to make easy the opening of drivers by layer 2 modules.
| |
| − |
| |
| − |
| |
| − | <TABLE BORDER=1 BORDERCOLOR="#000000" CELLPADDING=7 CELLSPACING=0 width="80%">
| |
| − | <TR>
| |
| − | <TD >
| |
| − | <P ALIGN=CENTER><B>BABEL service groups</B></P>
| |
| − | </TD>
| |
| − | <TD COLSPAN=2 >
| |
| − | <P ALIGN=CENTER><B>BABEL services</B></P>
| |
| − | </TD>
| |
| − | </TR>
| |
| − | <TR>
| |
| − | <TD ROWSPAN=6 >
| |
| − | <P ALIGN=CENTER><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">RPD_Server</FONT></FONT></P>
| |
| − | </TD>
| |
| − | <TD >
| |
| − | <P ALIGN=LEFT>…<FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">:</FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><B>getRobotName</B></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">(</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>out
| |
| − | </I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">string
| |
| − | name </FONT></FONT>
| |
| − | </P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">)</FONT></FONT></P>
| |
| − | </TD>
| |
| − | <TD >
| |
| − | <P ALIGN=CENTER><FONT SIZE=1 STYLE="font-size: 8pt">Returns the
| |
| − | name of the currently selected RPD, as appearing in the
| |
| − | </FONT><FONT SIZE=1 STYLE="font-size: 8pt"><I>selected_RPD</I></FONT><FONT SIZE=1 STYLE="font-size: 8pt">
| |
| − | table</FONT></P>
| |
| − | </TD>
| |
| − | </TR>
| |
| − | <TR>
| |
| − | <TD >
| |
| − | <P ALIGN=LEFT>…<FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">:</FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><B>getRobot2DShape</B></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">(</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>out
| |
| − | </I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">COMMMON::SeqOfFloats
| |
| − | x,</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>out
| |
| − | </I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">COMMMON::SeqOfFloats
| |
| − | y</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">)</FONT></FONT></P>
| |
| − | </TD>
| |
| − | <TD >
| |
| − | <P ALIGN=CENTER><FONT SIZE=1 STYLE="font-size: 8pt">Returns the 2D
| |
| − | shape of the robot, as stored in the </FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">RPD_shape2D…</FONT></FONT><FONT SIZE=1 STYLE="font-size: 8pt">
| |
| − | table of its descriptor.</FONT></P>
| |
| − | </TD>
| |
| − | </TR>
| |
| − | <TR>
| |
| − | <TD >
| |
| − | <P ALIGN=LEFT>…<FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">:</FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><B>getAllLogicalDevices</B></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">(</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>out
| |
| − | </I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">BABEL::RPD_Server::</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">SeqOfLogicalDevices
| |
| − | devices</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">)</FONT></FONT></P>
| |
| − | </TD>
| |
| − | <TD >
| |
| − | <P ALIGN=CENTER><FONT SIZE=1 STYLE="font-size: 8pt">Returns all
| |
| − | the information for all the logical devices on the robot. See
| |
| − | Appendix III for BDL definitions.</FONT></P>
| |
| − | </TD>
| |
| − | </TR>
| |
| − | <TR>
| |
| − | <TD >
| |
| − | <P ALIGN=LEFT>…<FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">:</FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><B>findLogicalDevicesByType</B></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">(</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">in
| |
| − | string type,</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>out
| |
| − | </I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">BABEL::RPD_Server::</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">SeqOfLogicalDevices
| |
| − | devices</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">)</FONT></FONT></P>
| |
| − | </TD>
| |
| − | <TD >
| |
| − | <P ALIGN=CENTER><FONT SIZE=1 STYLE="font-size: 8pt">Returns all
| |
| − | the information for logical devices on the robot of the specified
| |
| − | type (case insensitive comparison). See Appendix III for BDL
| |
| − | definitions.</FONT></P>
| |
| − | </TD>
| |
| − | </TR>
| |
| − | <TR>
| |
| − | <TD >
| |
| − | <P ALIGN=LEFT>…<FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">:</FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><B>getLogicalDevicePose</B></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">(</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">in
| |
| − | unsigned long deviceID,</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>out</I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">
| |
| − | float x,</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>out</I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">
| |
| − | float y,</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>out</I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">
| |
| − | float z,</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>out</I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">
| |
| − | float yaw,</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>out</I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">
| |
| − | float pitch,</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>out</I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">
| |
| − | float roll,</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>out</I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">
| |
| − | boolean static,</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">out
| |
| − | boolean devNotFound</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">)</FONT></FONT></P>
| |
| − | </TD>
| |
| − | <TD >
| |
| − | <P ALIGN=CENTER><FONT SIZE=1 STYLE="font-size: 8pt">Returns the
| |
| − | current 3D pose of the indicated device (if not found, </FONT><FONT SIZE=1 STYLE="font-size: 8pt"><I>devNotFound</I></FONT><FONT SIZE=1 STYLE="font-size: 8pt">
| |
| − | will be true). This includes solving the cinematic chain, even for
| |
| − | the case of mobile joints. If the device has a static pose, </FONT><FONT SIZE=1 STYLE="font-size: 8pt"><I>static</I></FONT><FONT SIZE=1 STYLE="font-size: 8pt">
| |
| − | will be true, and its pose must not be requested anymore. </FONT>
| |
| − | </P>
| |
| − | </TD>
| |
| − | </TR>
| |
| − | <TR>
| |
| − | <TD >
| |
| − | <P ALIGN=LEFT>…<FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">:</FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><B>getSettingsForModule</B></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">(</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>in</I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">
| |
| − | string myModuleName,</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>in</I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">
| |
| − | string myAlias,</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt"><I>out
| |
| − | </I></FONT></FONT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">string
| |
| − | settings</FONT></FONT></P>
| |
| − | <P ALIGN=LEFT><FONT FACE="Courier New, monospace"><FONT SIZE=1 STYLE="font-size: 8pt">)</FONT></FONT></P>
| |
| − | </TD>
| |
| − | <TD >
| |
| − | <P ALIGN=CENTER><FONT SIZE=1 STYLE="font-size: 8pt">Returns a
| |
| − | multi-line text in the form “key=value” with settings for a
| |
| − | specific calling module name (and optionally an alias name, left
| |
| − | blank if not used). This text is the content of the field “ini”
| |
| − | for the table “INI_<moduleName>[+<myAlias>]@<robotName>”.</FONT></P>
| |
| − | </TD>
| |
| − | </TR>
| |
| − | </TABLE>
| |
RPDs
Description
The Robotic Platform Descriptors (RPDs) address two problems of the robotic software: which parts do constitute the body of the robot, and how are they disposed spatially?. For example: how many devices of each type are attached to the robot? Where are they? If the head is turned to a given direction, where the cameras are pointing to?
The RPD aims to solve these questions for modules in run-time. We define the RPD for a specific robot as the set of logical devices constituting that robot, their descriptions and their physical disposition on the robot. Some logical device types we consider are: sonar, infrared or laser sensors, wheels based mobile bases, cameras, PTUs or robotic arms.
From our experience we know the usefulness of portable robotic applications, which can be executed on different robots. In these cases a part of the application will remain unchanged (high-level functions), while low-level, hardware dependant modules must be interchanged in the porting process. Now a given robotic platform is totally specifically by its RPD, which also specifies the low-level modules required for executing any application in that robot. Therefore, we store a diversity of such RPDs in a database, where additional information about low-level modules (HAD layer) is also kept.
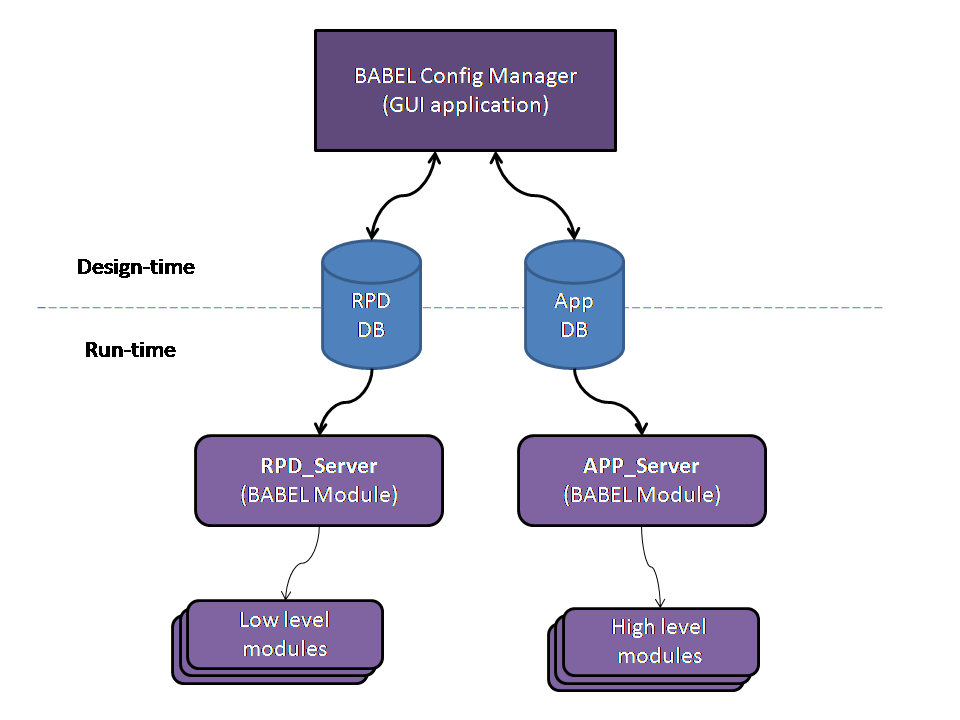
Fig. Robotic Platform Descriptors (RPDs) play the central role in the representation of the robot itself and its sensory and motor elements. In the figure the main concepts stored in this database are summarized. Refer to the text for further explanation.
The RPDs is stored in a file in a database format. A design-time visual application (Visual_RPD_editor) allows us to visualize and change this database easily. It can be used, for example, to specify the addition of new sensors to a robot. This database is read in execution-time by the BABEL module RPD_Server, which did not appear in Error: Reference source not found, but acts as a server of information about the robotics platform for the rest of modules. Next we formally specify the database format.
The XML database
BABEL modules developers will usually use only the services of RPD_Server and the Visual RPD editor application, so this section can be skipped.
RPDs for all robotic platforms, together with the required information about modules, are stored in a single file database (“roboticPlatformDescriptors.db”). Currently the format of this database is the simple structure defined by the MRPT C++ library in the class mrpt::utils::CSimpleDatabase.
Next we enumerate the existing tables in this database, describe its fields and how they are used. Note that all these specifications are only needed to programmers of the RPD_Server module and the Visual RPD Editor, since all other modules directly use the BABEL services of RPD_Server and do not deal with the database file at all.
Next the general tables are specified. These tables will always be present, independently of the number of RPDs.
|
NAME
OF TABLE
|
RPD_list
|
|
DESCRIPTION
OF TABLE
|
This table
enumerates all defined RPDs in the database: one per robotic
platform (physical or simulated robots)
|
|
FIELDS
|
FIELD
DESCRIPTIONS
|
|
robot_name
|
The name of
the robotic platform.
|
|
NAME
OF TABLE
|
selected_RPD
|
|
DESCRIPTION
OF TABLE
|
This table
holds only one record, with the name of the currently selected
robotic platform (or “robot”). This is checked at run-time to
determine which RPD is to be read.
|
|
FIELDS
|
FIELD
DESCRIPTIONS
|
|
selected_robot
|
An entry from
the table RPD_list.
|
For each robot configuration listed in the table RPD_list,
the following tables must be also inserted in the database. They
therefore represent the part of the database which can be customized
to specify concrete information about robots.
|
NAME
OF TABLE
|
RPD_physical_devices_<robot_name>
|
|
DESCRIPTION
OF TABLE
|
<robot_name>
stands for the actual robot name, from the table RPD_list.
This table
lists the physical devices attached to the robot. It can be used
to determine the HAD layer modules which must be executed in the
robotic application. This table is also used to enter the
parameters to those modules for the specific case of this robotic
platform.
|
|
FIELDS
|
FIELD
DESCRIPTIONS
|
|
HAD_module
|
The name of
the HAD layer module.
|
|
opening_params
|
A set of
lines with the format “param=value” each one, containing the
parameters to be supplied to the module in the
DRV_COMMON::open(·)
BABEL service.
|
|
NAME
OF TABLE
|
RPD_logical_devices_<robot_name>
|
|
DESCRIPTION
OF TABLE
|
<robot_name>
stands for the actual robot name, from the table RPD_list.
This table
lists the logical devices of the robot, that is, the actual list
of elements building the sensory and motor system of the robot,
as well as their spatial position, physical connections between
them and HAD layer modules required to access them.
|
|
FIELDS
|
FIELD
DESCRIPTIONS
|
|
id
|
A numerical
index, starting from 0, which can be used as index for devices
(0,1,2,3,…). Typically the robotic mobile base is the element
with id=0.
|
|
type
|
The logical
device type, as specified in the table logical_device_types
|
|
isChainingPoint
|
“1” or
“0” depending on this element allowing (or not) other
elements to be physically attached to it. Most elements do not,
but for example, PTU or robotic arms can be used in this way. A
“1” in this field allows other devices to set this one as
their basePoint.
|
|
idOfBase
|
The numerical
id of the physical device acting as the reference for the 3D-pose
of this one. Typically the base id=0 (mobile base) is used as
reference.
|
|
x
|
The 3D pose
of this device, using the reference of the pose of the base
element specified in “idOfBase”. If this base is “a
chaining point”, the exact pose to be used is not the one of
that base element, but a relative displacement found through the
DRV_MOBILE_JOINT interface.
This allows
sensors mounted on PTUs, servos or robotic arms to be correctly
localized automatically.
|
|
y
|
|
z
|
|
yaw
|
|
pitch
|
|
roll
|
|
implementation
|
The name of
the HAD module where the required driver is implemented. Is this
is a “chaining point”, the “DRV_MOBILE_JOINT”
interface is assumed as well.
|
|
options
|
A list of
strings with the fomat “option=value” each one, where the
option names are stored in the table logical_device_types
for this device type.
|
|
NAME
OF TABLE
|
RPD_shape2D_<robot_name>
|
|
DESCRIPTION
OF TABLE
|
<robot_name>
stands for the actual robot name, from the table RPD_list.
This table
gives a simple 2D shape of the robot, which can be used for
visual display or obstacle avoidance purposes. Notice that this
description is static as it does not change with possible mobile
parts of the robot.
|
|
FIELDS
|
FIELD
DESCRIPTIONS
|
|
x
|
Each record
in this table defines a 2D point (x,y) in meters, such as they
build a closed polygon. The reference system is the reference
point of the robot mobile base, i.e. typically the mid-point
between the motor wheels.
|
|
y
|
